| 型号 | LT-I3-PNP |
| 测距原理 | 脉冲TOF |
| 激光波长 | 905 nm |
| 最大探测距离 | ≥ 10 m (70%反射率) / ≥ 4 m (10%反射率) |
| 检测范围 | 270° |
| 数据采样率 | 18 KHz / 54 KHz |
| 扫描频率 | 25 Hz |
| 角度分辨率 | 0.5° |
| 测距精度 | ±2 cm (10 m内) |
| 响应时间 | 40 ms |
| 启动时间 | < 10 s |
| 通道数量 | 64 个(每个通道内包含3个检测区域) |
| 检测输出延时 | 0-2 s 范围内可设置 |
| 检测保持延时 | 0-2 s 范围内可设置 |
| 检测尺寸 | 0-5° 范围内可设置 |
| 开关量输入 | 6 个 |
| 开关量输出 | 4 个(3个区域信号,1个故障信号) |
| 指示灯 | 4 个(3个区域信号,1个故障信号) |
| 通信接口 | USB-TYPE C(串口) |
| 供电电源 | DC 9 V–28 V |
| 功耗 | 额定功率:< 1 W(无负载) 启动功率:< 3 W(无负载) |
| 工作温度 | -10 ℃ 至 50 ℃ |
| 存储温度 | -20 ℃ 至 70 ℃ |
| 环境湿度 | 85%以下,无冷凝 |
| 防护等级 | IP65 |
| 抗环境光 | 80000 Lux |
| 重量 | 171 g |
| 尺寸 | 50 mm(L) * 50 mm(W) * 72 mm(H) |
| 正弦振动 | 频率10Hz~1000Hz,加速度5g,三轴,每轴各10次循环 |
| 随机振动 | 频率5Hz~250Hz,G r.m.s=4.24g,三轴,每轴各5小时 |
| 抗冲击性 | 加速度50g,脉冲时间3ms,每个轴向各冲击5000次共30000次 |
| 电磁兼容性 | EMI EN61326-1:2013、EN55011:2010;EMS EN61000-4-2:2009、EN61000-4-3:2010、EN61000-4-8:2010 |
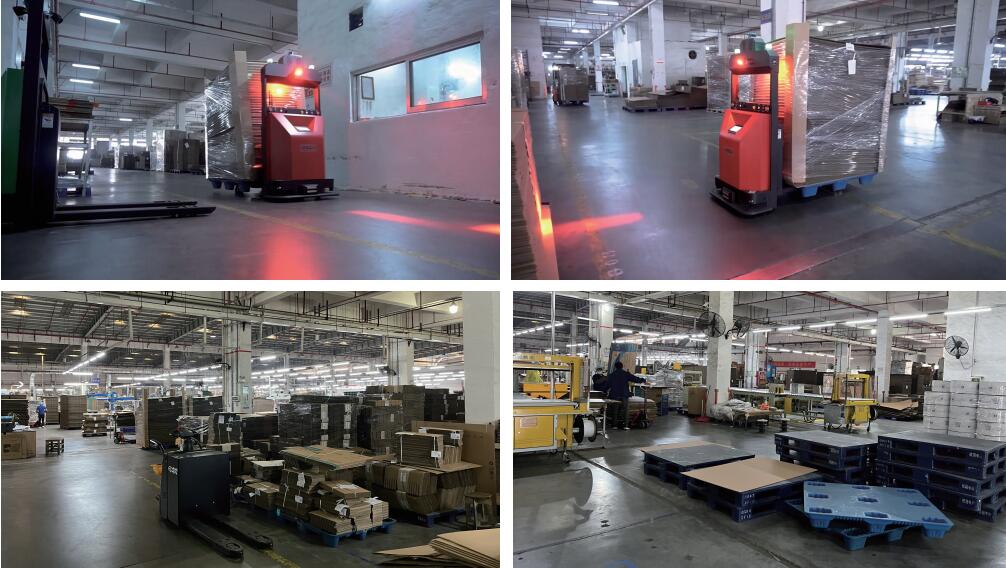
全象智能搬运机器人核心硬件涵盖高性能激光雷达、搬运机器人控制器、声光警报系统等,从建图定位、导航、运控跟随、感知到整车控制,全方位覆盖搬运机器人的核心功能需求。






 自动搬运到绕膜机绕膜后,再通过卷帘门,自动搬运到成品仓入库。")


累计服务超过 100+ 行业客户:家电、食品、饮料、新能源、个护、电子、化工、物流、造纸。

搬运机器人(AMR)服务于周转区与产线之间的物料上料运转

与码垛机器人联动,码垛完成后,自动呼叫搬运机器人 (AMR)搬运成品至周转核数区域或仓库

搬运机器人(AMR)自动搬运成品到周转区或出库区

搬运机器人(AMR)自动把原料搬运到产线上,实现自动上料。

搬运机器人(AMR)自动搬运到绕膜机绕膜后,再通过卷帘门, 自动搬运到成品仓入库

新能源控制柜下线后搬运入库与产线物料调度出库
······




电话咨询
在线留言
微信咨询